PEMBERI
MAKAN KUCING OTOMATIS

Mahasiswa1
dan Dosen Program2 Studi
Teknik Elektronika,
Jurusan
Teknik Elektro, Politeknik Negeri Semarang Jl. Prof. H. Soedarto, SH,
Tembalang, Semarang, Indonesia.
Email
: dewipertiwi843@gmail.com
, dwikiputra125@gmail.com
, esa.miscria69@gmail.com
, zaidan1649@gmail.com
, sambetak2@gmail.com
A Absract- Animal feed givers automatically use the Arduino UNO R3 microcontroller as a data
processing media. making this tool using components that have been divided into three main
p arts, namely input, process and output. The input components are Bluetooth modules (HC05),
ultrasonic sensors (HCSR04) and Infrared sensors. Then in the process or processing section
the data used is the Arduino UNO R3 microcontroller. On the output, namely using LEDs and
servo motors. The LED is used as an indicator of the presence or absence of food in the
tendon and the servo motor is used to open and close the lid on Tando. A tool made to make it
easier for animal keepers to feed pets.
Keyords: Arduino UNO R3, Bluetooth Module (HC05), Ultrasonic Sensor (HCSR4), Infrared Sensor,
LED, Servo Motor.
Intisari – Pemberi makan hewan peiharaan otomatis menggunakan mikrokontroler Arduino UNO
R3 sebagai media pengolah data. Pada pembuatan alat ini menggunakan komponen- komponen
yang telah dibagi dalam tiga bagian utama yaitu masukan, pemroses dan luaran. Komponen
masukannya adalah modul Bluetooth (HC05), sensor ultrasonik (HCSR04) dan sensor Inframerah.
Kemudian pada bagian proses atau pengolahan data yang digunakan adalah mikrokontroler
Arduino UNO R3. Pada bagian luaran yaitu menggunakan LED dan Motor servo. LED digunakan
sebagai indikator ada tidaknya makanan dalam tendon dan motor servo digunakan untuk
membuka dan menutup tutup pada tando. Alat yang dibuat untuk mempermudah para pemelihara
hewan dalam pemberian makan pada hewan peliharaan.
Kata kunci :
Arduino UNO R3, Modul Bluetooth (HC05), Sensor ultrasonik (HCSR04), Sensor Inf Inramerah (FC51), LED, Motor Servo.
I.PENDAHULUAN
Ketepatan waktu
dalam meberi makan hewan peliharaan merupakan suatu kewajiban yang
tidak bisa
di tinggalkan. Sementara itu pemilik hewan juga harus melakukan aktivittas
lain,
misal bekerja atau kuliah dan semisalnya. Hal tersebut dapat mempengaruhi
pemberian makan
pada hewan peliharaa. Selain itu dengan menggunakan pemberi makan hewan
pelihara jadwal
makan hewan peliharaan akan lebih terkontrol apabila sang pemelihara sibuk.
makan hewan peliharaan akan lebih terkontrol apabila sang pemelihara sibuk.
Masalah ini membuat
banyak orang menjadi ragu-ragu untuk memelihara hewan peliharaan
di rumah [1]. Untuk mengatasi masalah ini maka
diciptakanlah alat yang akan membantu
para pecinta hewan peliharaan. Alat ini
dapat Pemberi makan hewan pelihara dikhususkan
untuk mereka
pemilik peliharaan yang sering berada jauh dari peliharaannya atau sedang
sibuk
sehingga mereka kesulitan untuk memberi makan peliharaannya. Namun tidak
menutup
kemungkinan juga untuk pemilik-pemilik peliharaan yang menyayangi peliharaannya
agar dapat memberi
makan hewan peliharaannya
1.1 1.1 Rumusan Masalah
1. 1. Bagaimana
mempermudah para pemilik peliharaan dalam memberi makan hewan peliharaan dari
kejauhan?
2. 2. Bagaimana membuat pemberian makan pada
hewan ?
1.2 1.2 Tujuan
1. 1. Untuk mempermudah
para pemilik peliharaan dalam memberi makan hewan peliharaan dari kejauhan
2. 2. Membuat pemberian makan pada hewan berbasis Arduino yang dapat memberi makan
secara otomatis.
1.3 1.3 Metodolgi Penelitian
Me 1.Metodologi dalam pembuatan alat ini adalah :
1. 2.Studi
pustaka alat dan bahan
2. 3.Perancangan
perangkat lunak dan program
3. 4.Implementasi
program
4. 5.Pengujian
perangkat lunak dan perangkat keras
5. 6.Analisa
II. TINJAUAN PUSTAKA
A.
Arduino
UNO R3
Arduino uno adalah arduino board yang menggunakan mikrokontroler
ATuno328. Arduino uno memiliki 14 pin digital (6 pin dapat digunakan sebagai
output PWM), 6 input analog, sebuah 16 MHz osilator kristal, sebuah koneksi
USB, sebuah konektor sumber tegangan, sebuah header ICSP, dan sebuah tombol
reset. Arduino uno memuat segala hal yang dibutuhkan untuk mendukung sebuah
mikrokontroler. Menghubungkan Arduino Uno ke sebuah komputer melalui USB atau
memberikan tegangan DC dari baterai atau adaptor AC ke DC sudah dapat
membuatnya beroperasi. Arduino uno menggunakan ATuno328 yang diprogram sebagai
USB-to- serial converter untuk komunikasi serial pada komputer melalui port USB[2].

Gambar 2.1 Arduino R3
B. Motor Servo
Motor servo adalah sebuah perangkat atau aktuator putar
(motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo),
sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi
sudut dari poros output motor.
Motor servo mampu bekerja dua arah yaitu : Clock Wise (CW)
dan Counter Clock Wise (CCW). Arah dan sudut pergerakan rotor dari motor servo
dapat dikendalikan hanya dengan memberikan pengaturan duty cycle sinyal PWM
pada bagian pin kontrolnya [3]
Motor servo digunakan sebagai actuator buka tutup celah
pakan kucing. Motor servo adalah sebuah motor DC kecil yang memiliki rangkaian
kontrol elektronik dan internal gear untuk mengendalikan pergerakan dan sudut
angularnya. Motor servo memilki rate putaran yang lambat, tetapi memilki torsi
yang kuat [4].

Gambar 2.2 Motor Servo
C.
Modul
Bluethooth
HC-05 Adalah
sebuah modul Bluetooth SPP (Serial Port Protocol) yang
mudah digunakan untuk komunikasi serial wireless (nirkabel)
yang mengkonversi port serial ke Bluetooth. HC-05 menggunakan
modulasibluetooth V2.0 + EDR (Enchanced Data Rate) 3 Mbps dengan
memanfaatkan gelombang radio berfrekuensi 2,4 GHz. Dalam penggunaannya, HC-05 dapat beroperasi tanpa
menggunakan driver khusus.
Untuk
berkomunikasi antar Bluetooth, minimal harus memenuhi dua kondisi
berikut :
1. Komunikasi
harus antara master dan slave.
2. Password harus
benar (saat melakukan pairing).
Jarak sinyal
dari HC-05 adalah 10 meter, dengan kondisi tanpa halangan.

Gambar 2.3 Modul Bluetooth
D. Sensor Ultrasonik (HCSR04)
Sensor ultrasonik adalah sebuah sensor yang berfungsi untuk mengubah
besaran fisis (bunyi) menjadi besaran listrik dan sebaliknya. [5]

Gambar 2.4 Sensor hcsr04
E.
LED
Light Emitting Diode atau sering disingkat dengan LED adalah komponen
elektronika yang dapat memancarkan cahaya monokromatik ketika
diberikan tegangan maju. LED merupakan keluarga Dioda yang terbuat dari bahan
semikonduktor. Warna-warna Cahaya yang dipancarkan oleh LED tergantung pada
jenis bahan semikonduktor yang dipergunakannya. LED juga dapat memancarkan
sinar inframerah yang tidak tampak oleh mata seperti yang sering kita jumpai
pada Remote Control TV ataupun Remote Control perangkat elektronik lainnya. Bentuk LED mirip
dengan sebuah bohlam (bola lampu) yang kecil dan dapat dipasangkan dengan mudah
ke dalam berbagai perangkat elektronika. Berbeda dengan Lampu Pijar, LED tidak
memerlukan pembakaran filamen sehingga tidak menimbulkan panas dalam
menghasilkan cahaya. Oleh karena itu, saat ini LED (Light
Emitting Diode) yang bentuknya kecil telah banyak digunakan sebagai lampu
penerang dalam LCD TV yang mengganti lampu tube.

Gambar 2.5 LED
G.
Modul
IR
Modul sensor IR ini memiliki 3 pin di
atasnya - VCC (+ 5v), GND (0v) dan OUT. Sensor IR terdiri
dari pemancar IR dan penerima IR. Pemancar IR memancarkan radiasi infra merah
yang ketika dipantulkan oleh permukaan diterima oleh penerima IR. Pemancar IR
memancarkan radiasi infra merah dan jika ada objek dalam jangkauan maka
inframerah ya dipancarkan dipantulkan kembali oleh permukaan objek yang
kemudian diterima oleh penerima IR.

Gambar 2.6 Modul IR
III. PERANCANGAN
Bab ini membahas keseluruhan dari
perancangan sistem yang akan dibuat. Perancangan sistem ini terdiri dari
perancangan perangkat mekanik, perancangan perangkat keras, dan perancangan
perangkat lunak.
A.
Diagram
Blok Sistem

Gambar 3.1 Diagram Blok Sistem
B.
Cara
Kerja
• Sensor HCSR04 akan mendeteksi
gerakan hewan. Apabila ada gerakan dari hewan maka sensor akan HCSR04 akan
aktif dan motor servo akan aktif bergerak membuka 45 derajat. Membukanya motor
servo maka makanan tertuang kedalam wadah makanan kemudia tertutup kembali.
Servo juga dapat diaktifkan melalui device android yang sudah terhubung pada
modul Bluetooth
• Ketika kotak makanan sudah terisi penuh servo tidak akan membuka lagi
walaupun sensor pin mendeteksi adanya gerakan ataupun melalui device android
• Servo akan membuka kembali saat wadah makanan suda habis
• LED hijau akan menyala blink
saat pakan dalam tendon habis dan saat pakan dalam tendon penuh LED hijau
menyala
• LeD merah menyala saat
sensor HCSR04 dan servo tidak mendeteksi gerakan kucing
• LED biru menyala saat saat
sensor HCSR04 dan servo mendeteksi gerakan kucing
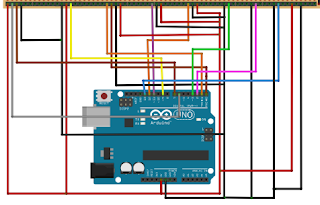
C.
Gambar
Pengawatan

Gambar 3.2 Gambar Pengawatan Dalam
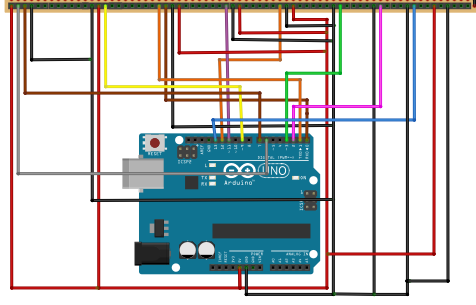
Gambar 3.3 Gambar Pengawatan Luar
D.
Gambar
Rangkaian Lengkap

Gambar 3.4 Diagram Rangkaian
E. Gambar Diagram Alir

Gambar 3.5 Diagram Alir
IV. PERANCANGAN MEKANIK
Pada alat ini menggunakan kotak berukuran
30cm x 30 cm untuk meletakkan komponen-komponen yang digunakan. Kotak ini
nantinya akan dipasang komponen-komponen dengan desain yang dapat
mengoptimalkan hasil kerja dari alat yang dibuat.

Gambar
4.1 Penampakan Kotak Alat dari Depan

Gambar
4.2 Penampakan Kotak Alat dari Belakang
V. PENGUJIAN DAN ANALISA
Tahap pengujian yang dilakukan yaitu pengujian respon sensor HCSR04 terhadap
keberadaan kucing.
A.
Hasil
Pegujian
Pada hasil Pengujian alat dapat memiliki spesifikasi sebagai berikut :
1. Apabila Connect device android
terhubung dengan modul Bluthoot
2. Sensor HCSR04 akan mendeteksi
gerakan hewan. Apabila ada gerakan dari hewan maka sensor akan HCSR04 akan
aktif dan motor servo akan aktif bergerak membuka 45 derajat. Membukanya motor
servo maka makanan tertuang kedalam wadah makanan kemudia tertutup kembali.
Servo juga dapat diaktifkan melalui device android yang sudah terhubung pada
modul Bluetooth
3. Ketika kotak makanan sudah terisi
penuh servo tidak akan membuka lagi walaupun sensor pin mendeteksi adanya
gerakan ataupun melalui device android
4. Servo akan membuka kembali saat
wadah makanan sudah habis
5.
LED hijau akan menyala blink
saat pakan dalam tendon habis dan saat pakan dalam tendon penuh LED hijau
menyala
6.
LED merah menyala saat sensor
HCSR04 dan servo tidak mendeteksi gerakan kucing
7.
LED biru menyala saat saat
sensor HCSR04 dan servo mendeteksi gerakan kucing
B. Analisa.
Dari hasil
percobaan, sensor HCSR04 mampu mendeteksi hewan dengan baik dan diperoleh hasil seperti pada hasil pengujian.
VI.KESIMPULAN
DAN SARAN
A.
Kesimpulan
1.
Pemberi makan hewan peliharaan
otomatis ini ini sangat berguna bagi pemilik hewan peliharaan yang sibuk dan
sering keluar rumah untuk menyelesaikan pekerjaan.
2. Penggunaan alat ini juga disertain
otomatisasi ewat Bluetooth sehingga memudahkan pemilik untuk memberi makan
hewan.
3. Apabila ada gerakan dari hewan
maka sensor akan HCSR04 akan aktif dan motor servo akan aktif bergerak membuka
45 derajat. Membukanya motor servo maka makanan tertuang kedalam wadah makanan
kemudia tertutup kembali. Servo juga dapat diaktifkan melalui device android yang sudah terhubung pada
modul Bluetooth
4. Sedangkan ketika kotak makanan
sudah terisi penuh servo tidak akan membuka lagi walaupun sensor pin mendeteksi
adanya gerakan ataupun melalui device android
5. Terdapat tiga indikator LED pada alat ini. LED mera untuk penanda bahwa
servo dan HCSR04 tidak mendeteksi kucing. LED biru adalah sebagai tanda bahwa
HCSR04 telah mendeteksi kucing dan servo membuka. Dan LED hijau sebagai
indikator habis tidaknya pakan pada tendon makanan.
B. Saran
- Untuk
selanjutnya alat lebih dikembangkan lagi agar dapat menggunakan internet
- Lebih baik ditambah dengan sistem takaran makanan yang harus dituangkan
VII. DAFTAR PUSTAKA
[1]E. Susanto, D. N. P.
Dharma, and M. Iqbal, “Rancang Bangun Alat Pemberi Makan Anjing / Kucing
Otomatis dengan Kontrol SMS,” Semin. Nas. Apl. Teknol. Inf., pp. 22–26,
2013.
[2]R. Rahardi, D. Triyanto, and suhardi, “PERANCANGAN SISTEM KEAMANAN
SEPEDA MOTOR DENGAN SENSOR FINGERPRINT, SMS GATEWAY, DAN GPS TRACKER BERBASIS
ARDUINO DENGAN INTERFACE WEBSITE,” J. Coding Sist. Komput. Untan, vol.
06, no. 03, pp. 118–127, 2018.
[3]A. Ridhamuttaqin, A. Trisanto, and E. Nasrullah, “Rancang Bangun Model
Sistem Pemberi Pakan Ayam Otomatis Berbasis Fuzzy Logic Control,” Electrician,
vol. 7, no. 3, pp. 125–137, 2013.
[4]R. Howell, “SISTEM PEMBERIAN PAKAN KUCING OTOMATIS BERBASIS ARDUINO
DENGAN METODE K-NEAREST NEIGHBOR (KNN) DAN ANTAR MUKA BERBASIS WEB,” J.
Coding Sist. Komput. Untan, vol. 05, no. 13, pp. 1–9, 2014.
[5]A. Waluyo, “PEMBERI PAKAN IKAN OTOMATIS MENGGUNAKAN ESP8266 BERBASIS
INTERNET OF THINGS ( IOT ) PEMBERI PAKAN IKAN OTOMATIS MENGGUNAKAN ESP8266
BERBASIS INTERNET OF THINGS ( IOT ),” 2018.
LAMPIRAN
1. PPT, KLIK DISINI
2. JURNAL, KLIK DISINI
3. PROGRAM ARD, KLIK DISINI
5. PROGRAM APK, KLIK DISINI
6. PENGAWATAN DALAM, KLIK DISINI
7. PENGAWATAN LUAR, KLIK DISINI
8. DIAGRAM ALIR, KLIK DISINI
9. DIAGRAM BLOK, KLIK DISINI
10. DIAGRAM RANGKAIAN LENGKAP, KLIK DISINI
11. SIMULASI PROTEUS, KLIK DISINI
BIODATA PENULIS

Penulis Dewi Aji Pertiwi. Dilahirkan di Pati, 22 Mei
1998. Penulis telah menempuh pendidikan formal SDN Bungasrejo, SMPN 1 Jakenan,
SMAN 1 Jakenan. Pada tahun 2016 penulis mengikuti seleksi mahasiswa baru diloma
(D3) dan diterima menjadi mahasiswa baru diploma ( D3) Teknik Elektronika,
Jurusan Teknik Elektro Politeknik Negeri Semarang. Penulis terdaftar dengan NIM
3.32.16.3.05. apabila ada saran dan
kritikan berikut email penulis dewipertiwi843@gmail.com

Nama Penulis Dwiki Putra M. Dilahirkan di Temanggung, 16 Agustur 1998.
Penulis telah menempuh pendidikan formal SDN Ngimbreng, SMPN 1 Temanggung, SMAN
1 Temanggung. Pada tahun 2016 penulis mengikuti seleksi mahasiswa baru diloma
(d3) dan diterima menjadi mahasiswa baru diploma ( D3) Teknik Elektronika,
Jurusan Teknik ElektroPoliteknik Negeri Semarang. Penulis terdaftar dengan NIM
3.32.16.3.05. apabila ada saran dan
kritikan berikut email penulis dwikiputra125@gmail.com

Nama Penulis Esa Firmansyah. Dilahirkan di Semarang,16 April 1998.
Penulis telah menempuh pendidikan formal
SDN Kartini, SMPN 5 Semarang, SMAN 9 Semarang. Pada tahun 2016 penulis
mengikuti seleksi mahasiswa baru diloma (D3) dan diterima menjadi mahasiswa
baru diploma ( D3) Teknik Elektronika, Jurusan Teknik Elektro Politeknik Negeri
Semarang. Penulis terdaftar dengan NIM 3.32.16.3.07 apabila ada saran dan kritikan berikut email penulis esa.miscria@gmail.com

Nama Penulis Widdy Zaidanizwar
F.P. Dilahirkan di Jakarta,16 April 1998. Penulis telah menempuh pendidikan
formal SDN Bulusan 01, SMPN 27 Semarang, SMAN 4 Semarang. Pada tahun 2016
penulis mengikuti seleksi mahasiswa baru diloma (D3) dan diterima menjadi
mahasiswa baru diploma ( D3) Teknik Elektronika, Jurusan Teknik Elektro
Politeknik Negeri Semarang. Penulis terdaftar dengan NIM 3.32.16.3.24 apabila
ada saran dan kritikan berikut email
penulis zaidan1649@gmail.com
Bagus sharingnya sangat bermanfat klu bisa info perkiraan biaya pembuatannya..terima kasih
BalasHapus